
About me
Hello,I am a graduate student of University of Electronic Science and Technology, majoring in signal and information processing, mainly focusing on visual target tracking. After my master’s degree in 2019, I worked as a senior algorithm engineer at DiDi Chuxing.
I am currently looking for a Ph.D. position. Contact me if you are interested in supervising me!
Click CV to know more detail of me.
Research interests
My research interests focus on Robotics, Computer Vision, and UAVs.
Education
M.S. in Signal and Information Processing, UESTC, July 2019 at IDIP-lab under the supervision of Prof. Peng Zhenming.
B.S. in Optical Information Science and Technology, UESTC, June 2016
Work experience
- 2019.7 - 2022.4: Senior Machine Learning Engineer, DiDi Chuxing
- ETA, Map team: Design ML\DL models to predict accurate arrival time (ETAs) to calculate fares, estimate pickup times, match riders to drivers, plan deliveries, and more. The ETA model is one of the most important services for LBS.
- 2015.10 - 2016.4: Intern, DJI.
- Flight control group: Develop BSP and HAL layer code and adapt sensors such as barometer, IMU, and UWB. I am also involved in developing the open platform OnboardSDK.
Innovation Startup
- Founder of Yuanliu Automatic Co. Ltd.
- Uses tilt-rotor VTOL fixed-wing UAVs to collect aerial images of tobacco fields in mountainous areas of Guizhou.
- Automatically tobacco Seedling detects algorithm for quantity counting.
- System has been launched into production.
- Certification
- Company got certified “Certificate of conformity of high and new-tech enterprise” (Issued by Science and Technology Department of Sichuan Province)
- Galley

VTOL planes in-service.
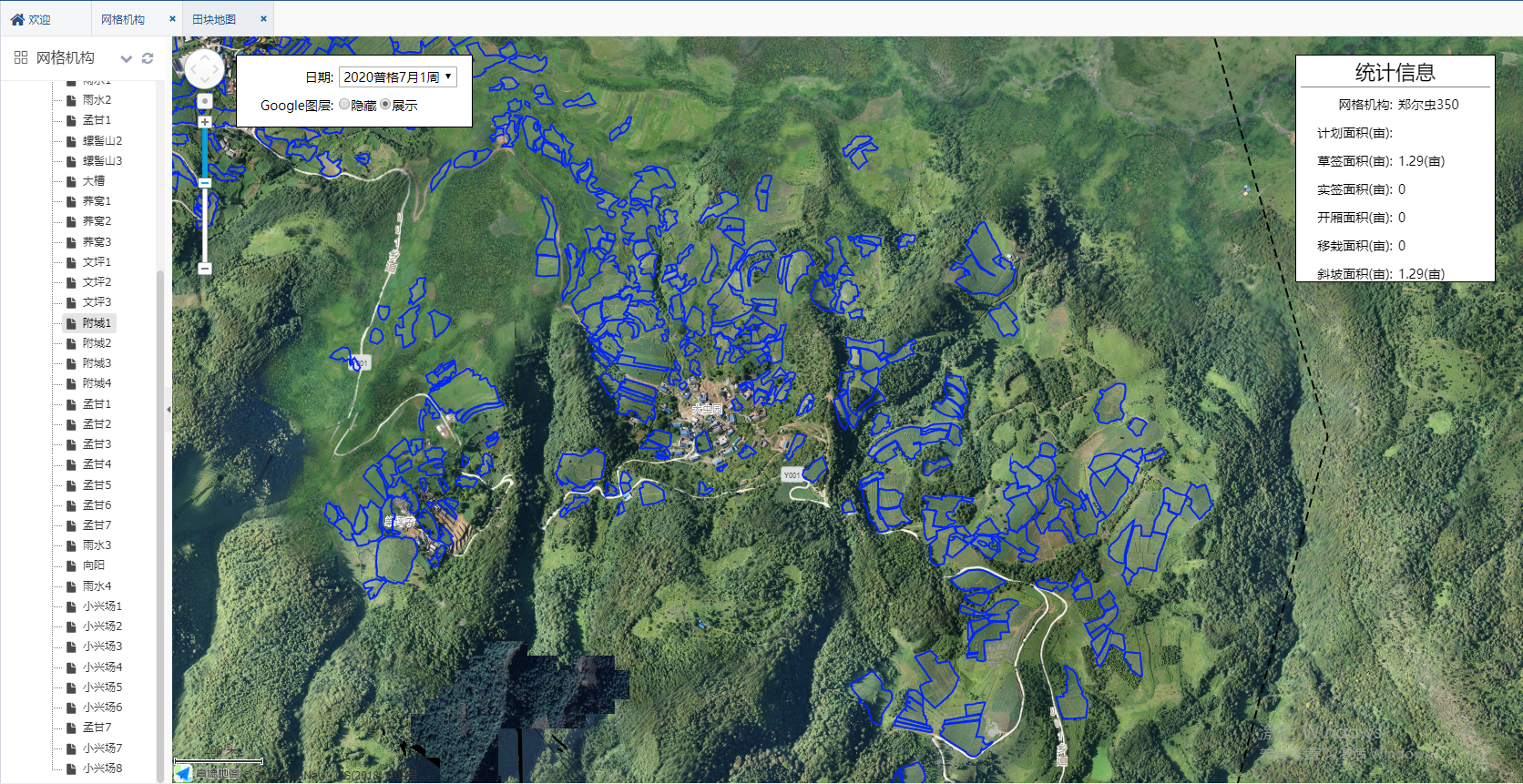
Tobacco planting manage system.
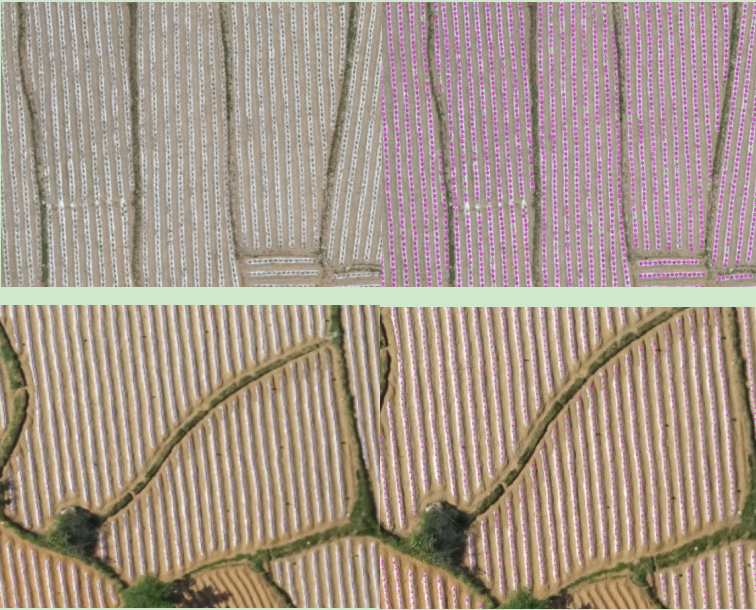
Automatically tobacco detect.
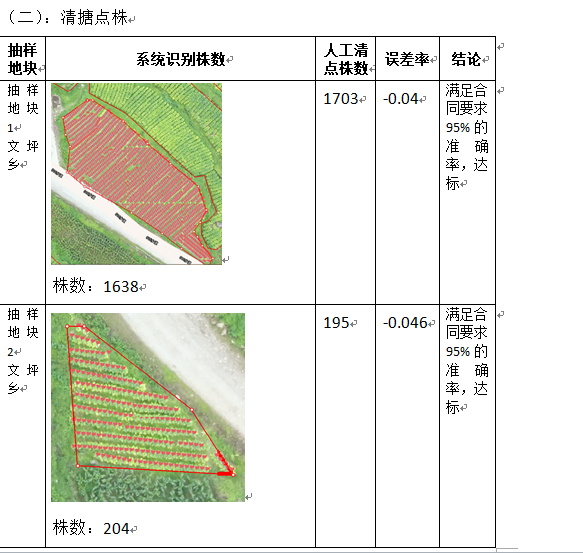
Almost the same as manual counting.

Company got certified "Certificate of conformity of high and new-tech enterprise.

Our first prototype tilt-rotor STOL airplane.
Competitions
- National Champion on 2015 ABU Asia-Pacific Robot Contest(Robocon)
- Badminton robot we build that can play well with humans.
- National Second prize on 2015 National Undergraduate Electronic Design Contest
- UAV completed the tasks of fixed-point take-off and landing, picking up items, and line patrol.

- UAV completed the tasks of fixed-point take-off and landing, picking up items, and line patrol.
Publication
Thesis
[1]卢耀坤. 复杂场景运动目标跟踪算法研究[D].电子科技大学,2019. [brief] [pdf]
Skills
- C++\Python\Scala
- Tensorflow\Spark
- OpenCV\ROS
- CET-6